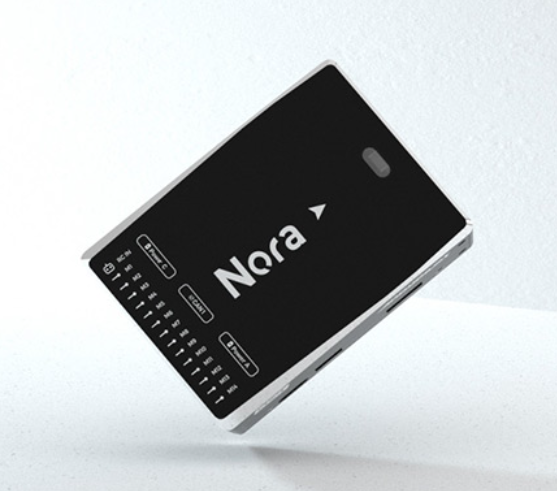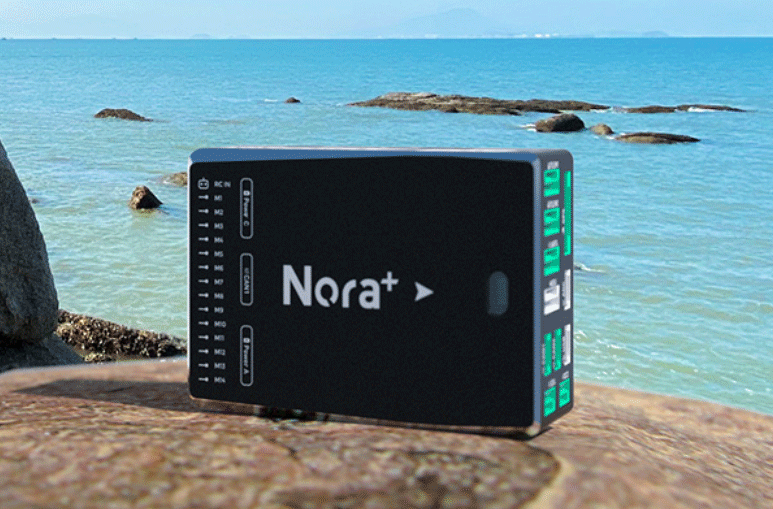











硬件参数
处理器 STM32H743
传感器
加速计 ICM-42688-P/ICM-20689/ICM-20689
陀螺仪 ICM-42688-P/ICM-20689/ICM-20689
电子罗盘 RM3100
气压计 MS5611*2
接口
UART串口 5
I2C 6(两个单独的i2c接口,两个集成在GPS/uart 4接口)
PWM输出 14(其中12路支持dshot协议)
RC IN 1个,支持PPM/SBUS/DSM
RSSI输入 PWM或3.3模拟电压
CAN标准总线 2
Power输入 2(Power A为普通ADC电源检测接口;Power C为CAN电流计接口
安全开关 1
GPS接口 2(UART4可作为GPS2接口)
ADC 1
Debug 1
JATG 1
USB接口 1
支持机型
Ardupilot 固定翼/3-8旋翼/直升机/VTOL垂直起降/无人车/无人船等
PX4固件 PX4固件支持的所有机型
工作环境及物理参数
PM工作电压 4.5 ~ 5.5 V
USB电压 4.75 ~ 5.25 V
伺服输入 0 ~ 36v
工作温度 -20 ~ 85°c
工作湿度 5%~95%(不凝结)
重量 101g

STM32H743处理器
ICM-42688-P加速计&陀螺仪
RM3100工业级罗盘
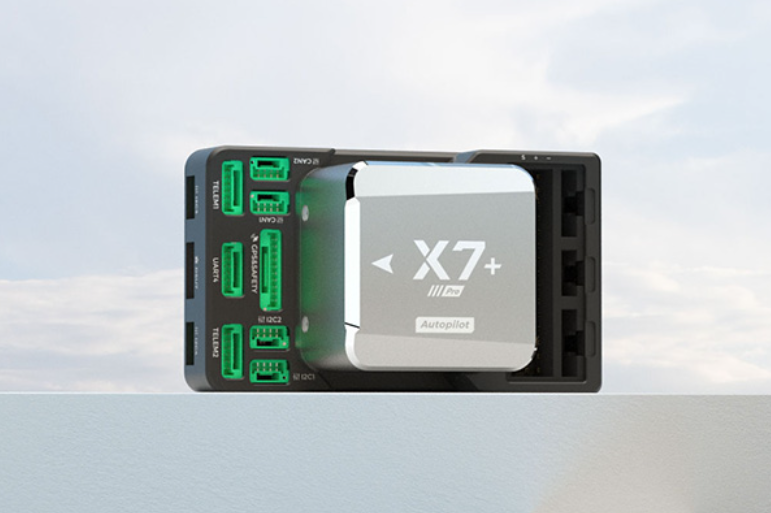
| X7+ Technical Specification | |
| Hardware Parameters | |
| Processor | STM32H743 |
| Safety switch | 1 |
| GPS interface | 2 (UART4 can be used as a GPS2 interface) |
| ADC | 1 |
| Debug | 1 |
| JATG | 1 |
| USB interface | 1 |
| Sensors | |
| Accelerometer | ICM-42688-P/ICM-20689/ICM-20689 |
| Gyro | ICM-42688-P/ICM-20689/ICM-20689 |
| Electronic Compass | RM3100 |
| Barometer | MS5611*2 |
| Interfaces | |
| UART serial port | 5 |
| I2C | 6 (2 separate i2c interfaces, 2 integrated in GPS/uart 4 interface) |
| PWM output | 14 (12 of them support dshot) |
| RC IN | 1 PCS, support PPM/SBUS/DSM |
| RSSI input | PWM or 3.3 Analog Voltage |
| CAN standard | 2 |
| Power input | 2 (Power A is a common ADC power detection interface; Power C is the CAN ammeter interface) |
| Support Type | |
| Ardupilot | Multi-rotor/Fixed wing/Helicopter /VTOL vertical take-off and landing /Unmanned ship/Unmanned vehicle, etc |
| PX4 firmware | PX4 firmware supported for all models |
| Working Environment and Physical Parameters | |
| PM Operating Voltage | 4.5 ~ 5.5 V |
| USB Voltage | 4.75 ~ 5.25 V |
| Servo Input | 0 ~ 36v |
| Operating Temperature | -20 ~ 85°c |
| Working Humidity | 5%~95% (non-condensing) |
| Weight | 101g |
 Successfully added!
Successfully added!